今天周末,和大家聊聊學習這件事情。
在如今這個社會,我們的時間被各類 APP 撕的粉碎。
刷知乎、刷微博、刷朋友圈;
看論壇、看博客、看公號;
等等形形色色的信息和知識獲取方式一個都不錯過。
貌似學了很多,但是卻感覺沒什麼用。
要解決上面這些問題,首先要分清楚一點,什麼是信息,什麼是知識。
你一切聽到的、看到的,都是信息,比如微博上的明星出軌、微信中的表情大戰、抖音上的段子視頻。
就是指那些被驗證過的、正確的、被人們相信的概念、規律、方法論。
概念是什麼很好理解,我們上學的時候做的最多的一件事情就是背概念。
規律是事物背後的運行法則,例如當市場上某一種貨物供應量減少后,就會導致價格的上升。
方法論俗稱【套路】,解決某一類問題的時候,有效的解決方案。
信息有真假,有時效,而知識有積累、有迭代。我們要學習的是知識,而不是信息。
時間複利
再說一個概念,複利。
這個大家都應該知道,比較多的應該是在銀行存錢或者是購買理財產品的時候,比如下圖的銀行複利增長曲線:
或者是下面這個公式:
1.01^365 = 37.8
隨公式還附贈一句雞湯:
如果一個人每天都能進步 1%,一年之後他的能力會提升 38 倍。
這句話雖然聽起來很雞湯,但是卻想不到有什麼問題,對吧?
反過來想一下這句話的前提,一個人都想要每天都能進步 1% ,這可能么?當然排除一些極端情況,對於看到我文章的大多數人來說,這是一件不可能的事情。
每天會形形色色的事情去阻止我們進步這 1% ,比如:
- 今天上班被領導批了,心情不好,不想學習了
- 今天工作太忙了,下班后時間都比較晚了,想要休息了
- 今天和朋友一起出去玩了,玩的很開心
- …
等等,然後我們看到身邊優秀的人的時候:
- 看到他們隨隨便便就考試考出來好成績
- 看到他們隨手寫的文章就是網絡爆文
- 看到他們對於某一項技術非常精通的時候
是不是會有一種無力感,好像他們平時和我們一樣,該吃吃該喝喝該玩玩,但是人家就是很厲害的樣子。
於是,就產生了強烈的焦慮感,要學習,要提高自己,開始看更多的信息,關注更多的學習圈子,焦慮感加重,負向循環開始了。
但是,如果你肯相信時間複利的效應,就不會焦慮。
Why?
你現在看到身邊的人的成績,看到他輕輕鬆松做到的事情,即使你拼盡全力也不可能做到。
從一開始你就錯了,他們已經完成了自己的原始積累,他們已經到達了這件事情的複利拐點 。
什麼是複利拐點?
圖中這個小人站的位置就是複利拐點,
如果一個人到達複利拐點(圖中小人站的地方),那他的收益,會急劇增長,可能比之前所有時間的收益總和還要多。
這裏的收益可以是錢,是能力,是認知。
知識
上面我們介紹了如何區分信息和知識,這裏再分享一個個人理解,有效知識。
判斷一個知識是否有效,就要看這個知識和你之前的已有的知識是否能產生聯繫。
如果可以產生聯繫,那麼你對這個新的知識理解速度會非常的快。
就好比編程語言,小編的本職工作是一名 Java 軟件工程師,但是當小編去學習 Python 的相關基礎知識的時候,速度是非常快的,用旁人的視角看起來就好像小編的學習效率非常的高效。
當然,我們不可能只學習和自己已有知識相關方向的知識,可能會接觸一些完全陌生的領域,那麼這個時候如何還能保持效率較高的學習?
在進入一個新的領域的時候,所有的知識都是一個點一個點的,好像是散落在沙子里的石頭,中間是毫無關聯的,這個時間段的學習是非常痛苦的,小編一般稱為原始積累階段。
很多人在原始積累的階段因為過程過於痛苦,就慢慢的放棄了。
在痛苦的原始積累階段,很多時候看不到盡頭,之前的學習感覺都學過,但是仔細一想,又好像什麼都沒學。
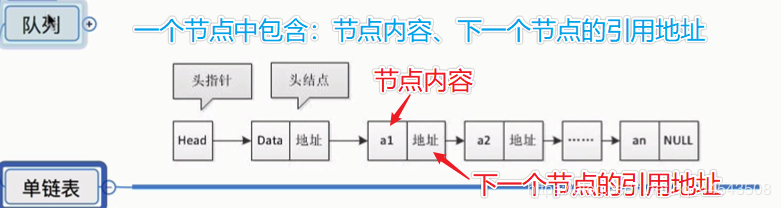
這時,我們可以藉助工具去加強知識之間的關聯和加深自己的記憶——思維導圖。
這個工具小編也經常在用的,比如很多人可能都見過我的公眾號上小編自己整理的 Java 進階相關的思維導圖。
當學習一個新的領域的時候,每當一些基礎的概念能產生聯繫的時候,就可以去畫這麼一張思維導圖,思維導圖能讓我們更清晰直觀的理解不同的事物之間的內在聯繫。
長時間的原始積累太過痛苦怎麼辦?
這個是所有人都會遇到的問題,做一件事情,尤其是學習,當我們無法取得一些成果的時候,對興趣和自信的打擊都會非常的大。
首先在做這件事情之前,你需要為自己找到足夠開始這件事情的理由,也就是要有強大的內驅力。
就好比考研這件事情,如果是身邊的人要考,所以你也要考,那麼我覺得你到底要不要考研這件事情值得再思考一下。
但如果是說你想通過考研,來改變自己的人生軌跡,想要獲得更高的起點,那麼,我覺得這個事兒十有八九你是能堅持下去的。
好比學習 Python ,好像身邊的人都在學,那我也要了解一下,和那種我想要學 Python 來換一份工作,擺脫目前的工作狀態,獲取更高的薪水。
大家可能看着沒什麼感覺,但是想一想,自己的人生中,到底有沒有過堅持某一件事情,並最終獲得了一個還不錯的結果,最後收穫的這份快感,是不是無與倫比的。
當然,除了強大的內驅力以外,小編還可以友情提供一點小技巧。
獲取階段性的正向反饋。
如果一件事情需要耗費較長的時間,那麼再大的內驅力也可能會被時間的流逝給磨平了。
靜靜思考下放棄的原因,沒有獲得成就感。
還是拿考研舉例子,一般考研需要準備大半年到一年左右的時間,很多人都堅持不過半年時間就放棄掉了,為什麼,因為他們看不到成效,看不到曙光。但是高三的高考很多人還是能堅持下來的,為什麼?
因為高三有月考啊,每次月考完,都能準確的知道自己的水平提升了多少,自己一個月的努力是沒有白費的,自己一個月的努力是真真實實的化成了卷子上的分數。
所以,做一件需要長時間奮戰的事情,最好能提前為自己設定一些階段性的成果檢驗方式。
時間管理
時間管理是一個繞不開的話題,這裏小編其實也沒資格談這件事情,因為小編本身的時間管理也做的並不好,小編也是人,加完班也會感覺到累,回到家也會只想着休息,人非聖賢,對吧。
還是分享一些經驗吧。
嘗試將自己一天做的事情和耗費的時間列一個表格出來(小編之前列舉過,時間有些久遠,找不到了,這裏就不放圖了)。
當這個表格列出來以後,不管多麼自律的人,肯定會發現,一天之中,有相當部分的時間是被浪費掉的,比如刷朋友圈,刷抖音,刷微博。
在生活中,肯定會經常性的出現這樣事情。
“再玩5分鐘手機就睡覺!”
結果12點了還在玩手機。
周末早晨起來,“先玩一局遊戲,在做xxx”。
結果就是玩到了下午。
相信我,那些墮落的人,並不是一開始就想墮落的。
他們只是在被生活中形形色色的誘惑給誘惑到了,因為現在的社會,各個 APP 在掏空了心思去搶佔用戶的留存時長,它們費勁心力的去討好用戶,讓用戶用最簡單最不需要付出的方式去獲得這種毫無意義的低成本的快樂。
所以,開始記錄自己的時間,是做時間管理的第一步。
當然,並不是要我們完全的放棄娛樂時間,這不可能,人不是機器,不可能是只要有電,就能工作,人也是需要休息的,記錄時間只是為了讓我們在面臨選擇的時候,做出正確的選擇。
第一次寫這種長篇內容分享,有內容不當的地方請各位同學海涵。
本站聲明:網站內容來源於博客園,如有侵權,請聯繫我們,我們將及時處理
【其他文章推薦】
※台北網頁設計公司這麼多,該如何挑選?? 網頁設計報價省錢懶人包”嚨底家”
※網頁設計公司推薦更多不同的設計風格,搶佔消費者視覺第一線
※想知道購買電動車哪裡補助最多?台中電動車補助資訊懶人包彙整
※小三通海運與一般國際貿易有何不同?
※小三通快遞通關作業有哪些?